运行指南
本指南介绍如何运行 Autonomy 项目,包括 C++ 直接运行和 ROS2 集成运行两种方式。
1 C++ 直接运行
1.1 运行格式
C++ 可执行文件命名格式:工程名.模块名.组件名.可执行文件名
# 示例
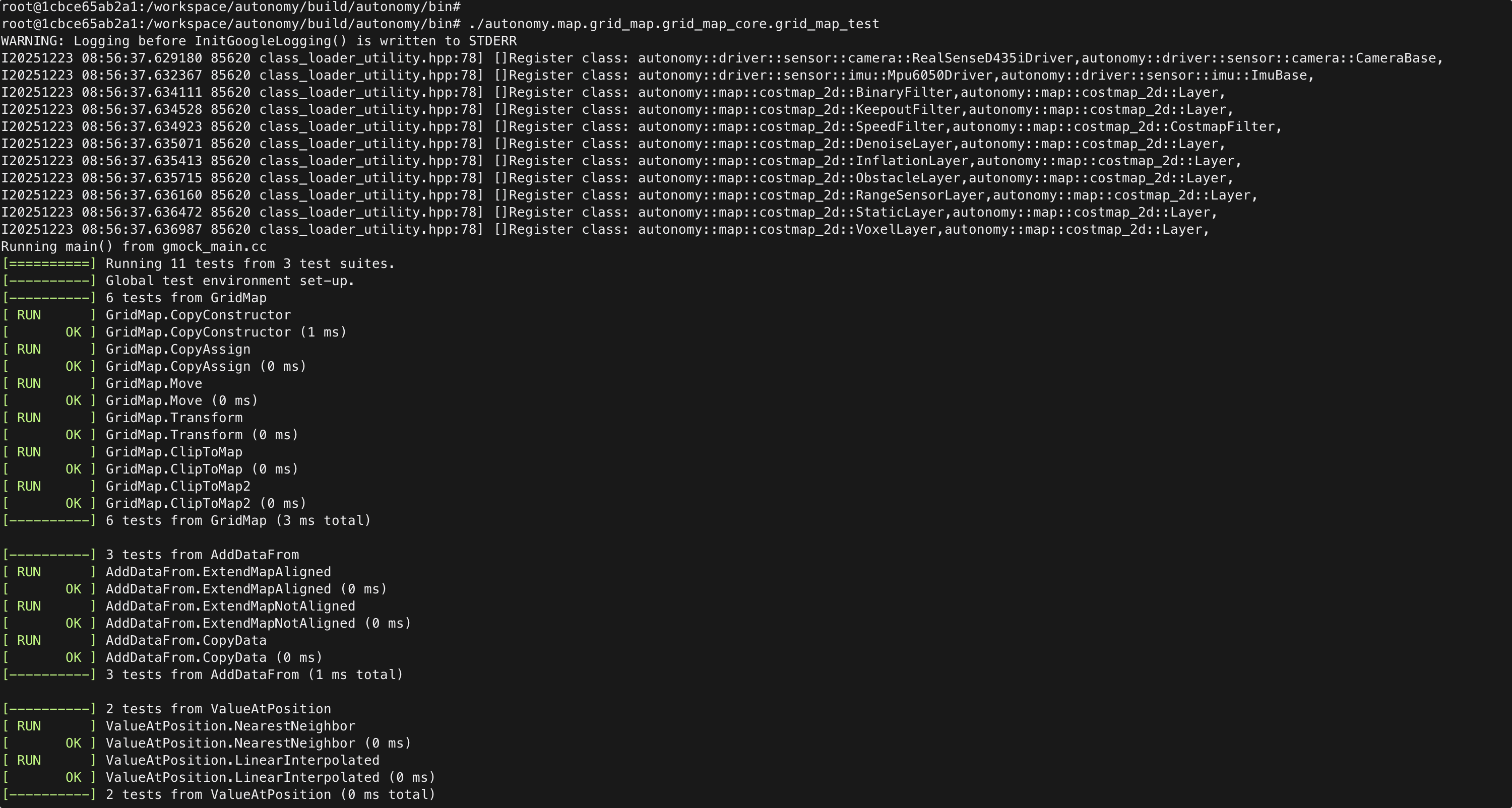
./autonomy.map.grid_map.grid_map_core.grid_map_test
1.2 命令行运行
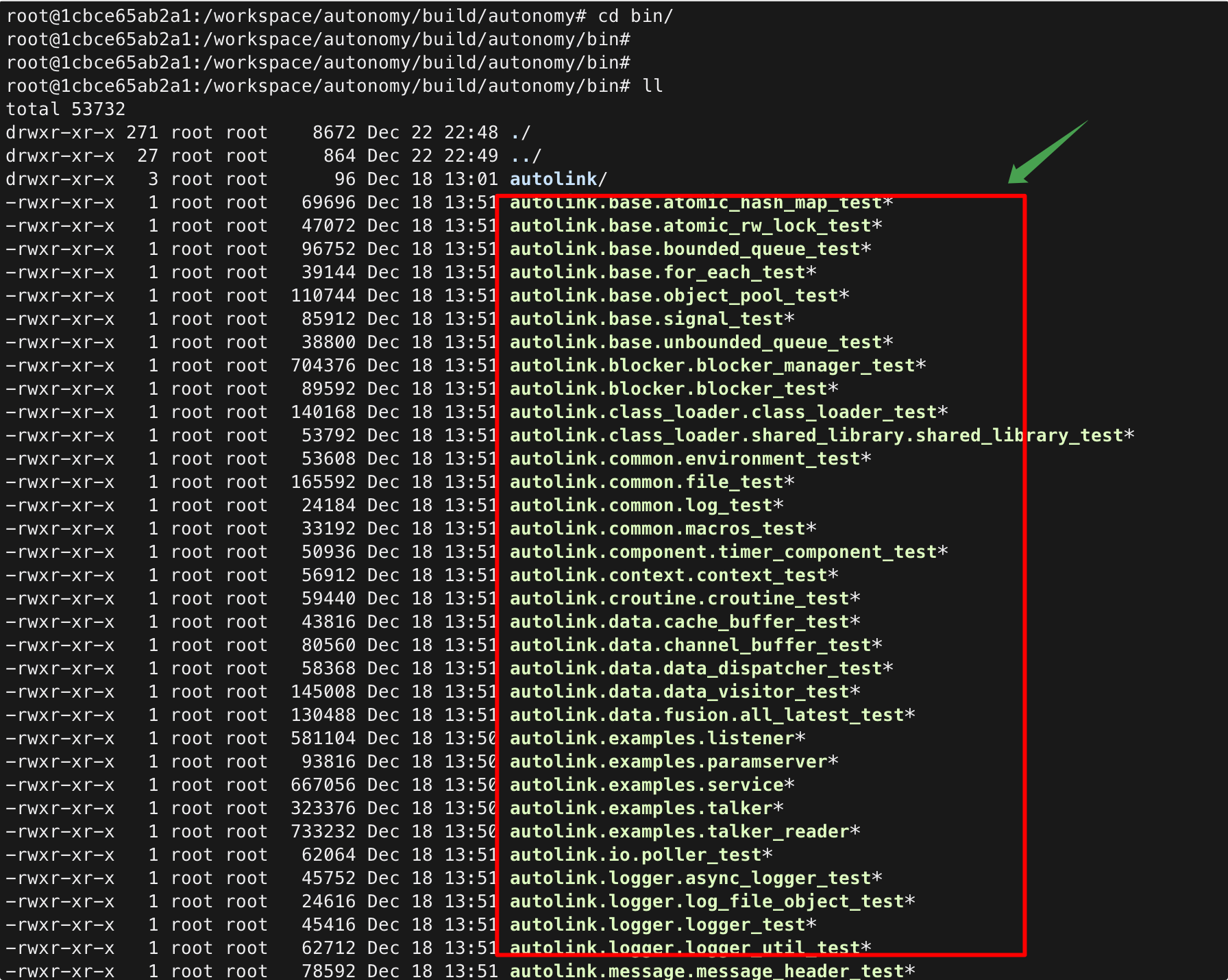
在编译完成后,进入可执行文件所在目录运行:
cd /workspace/autonomy/build/autonomy/bin
./autonomy.map.grid_map.grid_map_core.grid_map_test
2 ROS2 集成运行
2.1 环境变量配置
在运行 ROS2 节点之前,需要设置必要的环境变量。建议将其添加到 ~/.bashrc 文件中:
### Autonomy 环境变量 ###
export GLOG_logtostderr=1 # 日志输出到标准错误
export GLOG_alsologtostderr=0 # 不同时写入日志文件
export GLOG_colorlogtostderr=1 # 启用彩色日志
export GLOG_minloglevel=0 # 最小日志级别 (0=INFO)
export AUTOLINK_PATH=/workspace/autonomy/src/autonomy/autolink/autolink
### Autonomy_ROS 环境变量 ###
export AUTONOMY_MODEL=waffle # 机器人模型(可选)
### ROS2 环境 ###
source /opt/ros/humble/setup.bash
source /workspace/autonomy/install/setup.bash
使配置生效:
source ~/.bashrc
2.2 启动 Autonomy_ROS
使用 launch 文件启动 Autonomy_ROS 系统:
ros2 launch autonomy_ros autonomy.launch.py
Launch 参数说明:
参数 |
默认值 |
说明 |
|---|---|---|
|
|
是否使用仿真时间 |
|
|
是否使用 Gazebo 仿真 |
|
|
仿真世界类型 ( |
|
|
机器人初始 X 坐标 |
|
|
机器人初始 Y 坐标 |
示例:
# 使用 Gazebo 仿真
ros2 launch autonomy_ros autonomy.launch.py use_gazebo:=true world_type:=house
# 使用假节点(无仿真)
ros2 launch autonomy_ros autonomy.launch.py use_gazebo:=false
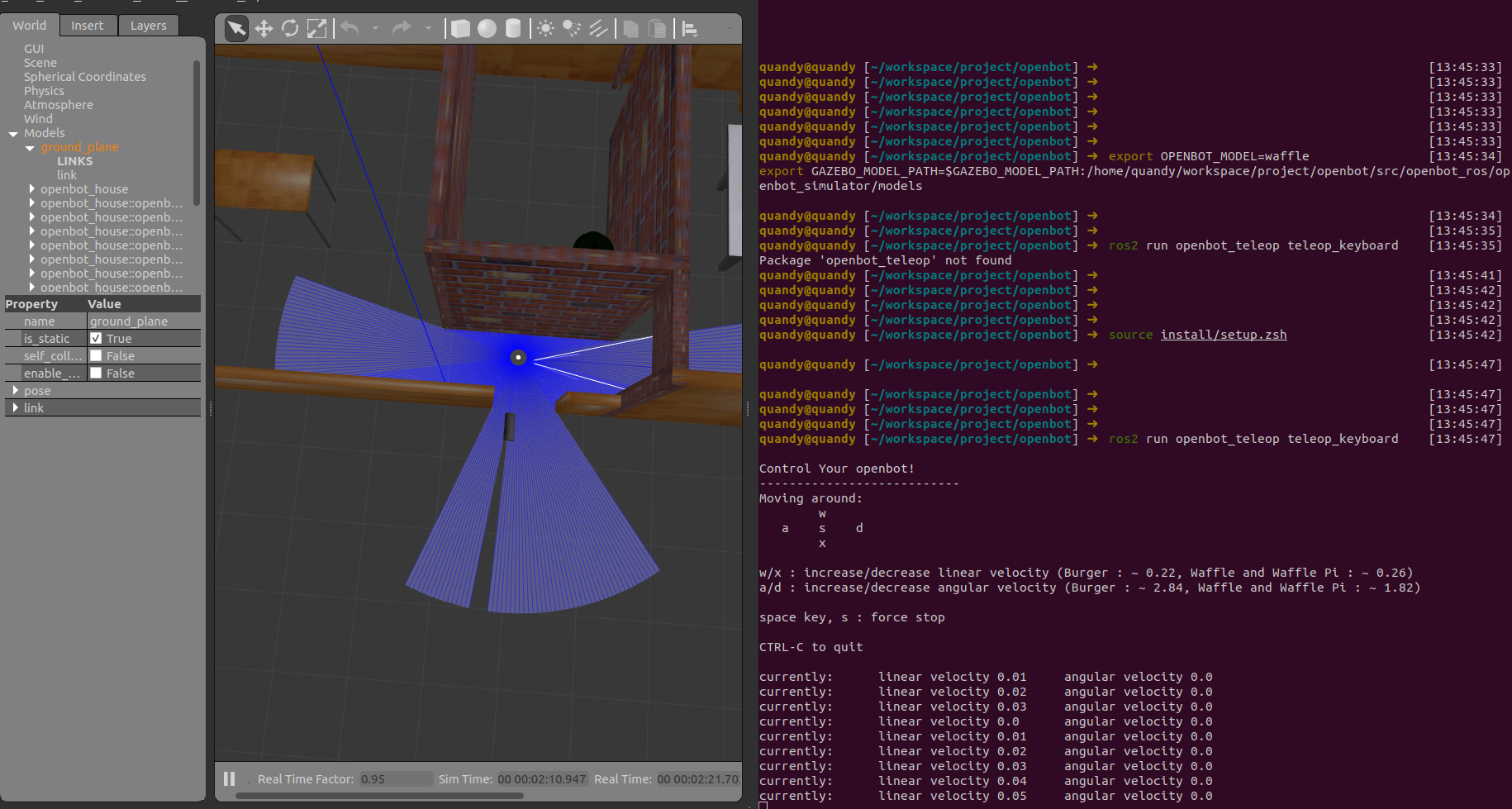
2.3 Gazebo 仿真(可选)
如果需要使用 Gazebo 进行仿真,可以使用以下命令:
# 空世界仿真
ros2 launch autonomy_gazebo empty_world.launch.py gui:=true spawn_robot:=true
# 房屋环境仿真
ros2 launch autonomy_gazebo autonomy_house.launch.py gui:=true spawn_robot:=true
3 验证运行状态
3.1 检查节点
# 查看所有运行中的节点
ros2 node list
# 查看特定节点信息
ros2 node info /<node_name>
3.2 查看话题
# 列出所有话题
ros2 topic list
# 查看话题内容
ros2 topic echo /<topic_name>
# 查看话题信息
ros2 topic info /<topic_name>
3.3 使用可视化工具
# 启动 RViz2
rviz2
# 启动 rqt
rqt
4 常见问题
Q: 提示找不到可执行文件?
A: 确保已经完成编译,并且可执行文件路径正确。
# 检查编译是否成功
ls /workspace/autonomy/install/autonomy/bin/
Q: ROS2 节点无法启动?
A: 检查环境变量是否已正确设置:
echo $GLOG_logtostderr
echo $AUTOLINK_PATH
Q: Gazebo 仿真无法启动?
A: 确保已安装 Gazebo 和相关依赖:
# 检查 Gazebo
which gazebo
gazebo --version